



COUP D'OEILréducteurs d'harmoniquesIl s'agit de dispositifs de réduction de précision innovants qui intègrent des matériaux composites en polyétheréthercétone (PEEK) à la structure du réducteur d'harmoniques, alliant ainsi les caractéristiques de rapport de réduction élevé des réducteurs d'harmoniques traditionnels aux avantages de la légèreté des matériaux PEEK. Voici une présentation détaillée en quatre dimensions : caractéristiques structurelles, innovation matérielle, paramètres de performance et domaines d'application.

I. Caractéristiques structurelles
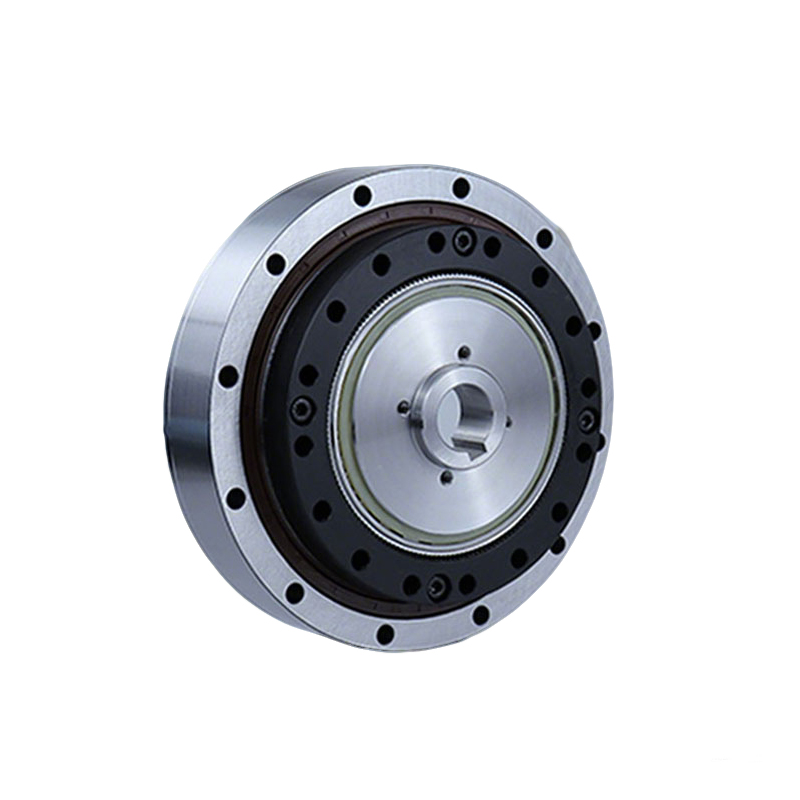
COUP D'OEILLes réducteurs d'harmoniques adoptent la structure classique d'entraînement harmonique : générateur d'ondes, engrenage flexible et engrenage rigide. L'innovation principale des réducteurs d'harmoniques réside dans l'utilisation de PEEK renforcé à 50 % de fibres de verre longues pour le moulage par injection monobloc de l'engrenage flexible. La bague intérieure de l'engrenage rigide est une structure à insert PEEK-métal (base en acier + surface de denture en PEEK). La bague extérieure du roulement du générateur d'ondes est intégrée à une cage autolubrifiante en PEEK, éliminant ainsi la dépendance à la graisse des réducteurs d'harmoniques traditionnels. La structure globale est optimisée par topologie, avec une tolérance d'épaisseur de paroi de l'engrenage flexible contrôlée à ± 0,01 mm pour garantir une déformation élastique constante lors de l'engrènement.
II. Innovation matérielle
Avancée en matière de légèreté : la densité de l'engrenage flexible PEEK n'est que de 1,5 g/cm³, ce qui réduit le poids de 60 % par rapport à un engrenage flexible en acier et abaisse le moment d'inertie de 45 %, améliorant considérablement la vitesse de réponse dynamique des articulations du robot.
Résistance à la fatigue : Grâce à l'optimisation de l'orientation des fibres, la durée de vie en fatigue de flexion de l'engrenage flexible PEEK atteint 10⁸ cycles (sous charge nominale), approchant 85 % du niveau de l'acier.
Optimisation du frottement : Le coefficient de frottement de la surface des dents PEEK est aussi bas que 0,05 (condition de frottement à sec), et lorsqu'il est combiné avec le revêtement PTFE sur la surface rigide des dents de l'engrenage, il permet un fonctionnement silencieux sans huile (bruit≤55 dB).
III. Paramètres de performance de base
Plage de rapports de réduction : 50:1 à 320:1 (transmission à un étage), prenant en charge la connexion en série à plusieurs étages pour obtenir un rapport de réduction ultra-élevé de 10 000:1
Couple nominal : 3 à 50 N・m (modèles correspondants HX-14 à HX-50), le couple maximal peut atteindre le double de la valeur nominale
Indicateurs de précision : Jeu≤1 minute, erreur de transmission≤30 secondes d'arc, rigidité en torsion≥20 N・m/rad
Adaptabilité environnementale : Température de fonctionnement -40°Cà 180°C, compatible avec les environnements sous vide (peut fonctionner de manière stable à 10⁻⁶Bien)
IV. Domaines d'application typiques
Robots collaboratifs : articulations du poignet des effecteurs terminaux, tels que le sixième axe du robot UR5e, permettant une préhension légère et de haute précision
Équipement médical : Petites articulations de mouvement des bras de robots chirurgicaux (tels que le Da Vinci Xi), nécessitant le respect d'environnements aseptiques et de faibles interférences électromagnétiques
Aérospatiale : mécanismes de contrôle d'attitude des satellites, bras mécaniques de drones, utilisant son adaptabilité au vide et ses caractéristiques de légèreté pour réduire les coûts de lancement.
Réducteurs d'harmoniques en PEEK : L'utilisation de PEEK renforcé de fibres de carbone (CF/PEEK) pour la fabrication de réducteurs d'harmoniques permet de réduire la contrainte de déformation à seulement 1/7 de celle de l'acier, d'améliorer les caractéristiques d'amortissement et de réduire le risque de résonance. Le nombre de dents de contact entre l'engrenage flexible et l'engrenage rigide peut être augmenté de 47 %, ce qui prolonge considérablement la durée de vie en fatigue, le nombre de cycles passant de 29 000 à 564 000 pour les engrenages flexibles métalliques.
Réducteurs d'harmoniques PEEK : CF/PEEK offre des performances supérieures
En plus des avantages tels que la résistance spécifique et la résistance à l'usure, par rapport aux cylindres courts à base de métalRéducteurs d'harmoniques PEEKLes réducteurs d'harmoniques PEEK fabriqués en CF/PEEK présentent les caractéristiques suivantes :1contrainte de déformation plus faible,②meilleures caractéristiques d'amortissement, réduisant efficacement la possibilité de résonance,③augmentation du nombre de dents de contact et de la zone d'engrènement entre l'engrenage flexible et les dents de l'engrenage rigide, améliorant la résistance à la charge et aux chocs du réducteur harmonique PEEK,④durée de vie supérieure en fatigue, etc.
(1) Comparé aux réducteurs harmoniques à cylindre court à base métallique, sous la même charge, la contrainte de déformation des matériaux composites à base de PEEK n'est que 1/7 de celle de l'acier. Par conséquent, avec une dimension axiale plus petite, un module d'engrenage et un coefficient de déformation radial plus importants peuvent être sélectionnés pour la structure de conception, offrant une plus grande liberté de conception.
(2) Les fréquences naturelles de l'ensemble du réducteur d'harmoniques en matériau composite à base de PEEK sont 40 à 45 % plus élevées que celles des réducteurs d'harmoniques à base de métal, ce qui indique que les réducteurs d'harmoniques en matériau composite à base de PEEK ont de meilleures caractéristiques d'amortissement et peuvent réduire efficacement la possibilité de résonance.
(3) Dans les conditions de fonctionnement nominales, avec une charge de 20 N·m et une vitesse de 2 000 rad/min, le nombre de dents engrenées du réducteur harmonique en matériau composite PEEK augmente pour atteindre 52 paires, soit une augmentation de 47 % par rapport au métal. L'augmentation du nombre de dents de contact et de la surface d'engrènement entre l'engrenage flexible et l'engrenage rigide élargit la surface d'engrènement de la paire d'engrenages, et la pression de contact est répartie sur davantage de surfaces de dents, améliorant ainsi la portance et la résistance aux chocs du réducteur harmonique PEEK.
(4) Avec la même structure, les réducteurs d'harmoniques à cylindre court en CF/PEEK présentent une meilleure résistance à la fatigue. Les réducteurs d'harmoniques métalliques traditionnels subissent des contraintes de déformation excessives, et les dents de l'engrenage flexible subissent une défaillance statique lorsque le nombre de cycles atteint 29 000. L'engrenage flexible en matériaux composites PEEK devrait atteindre 564 000 cycles et une durée de vie en fatigue de 939,5 heures.









