

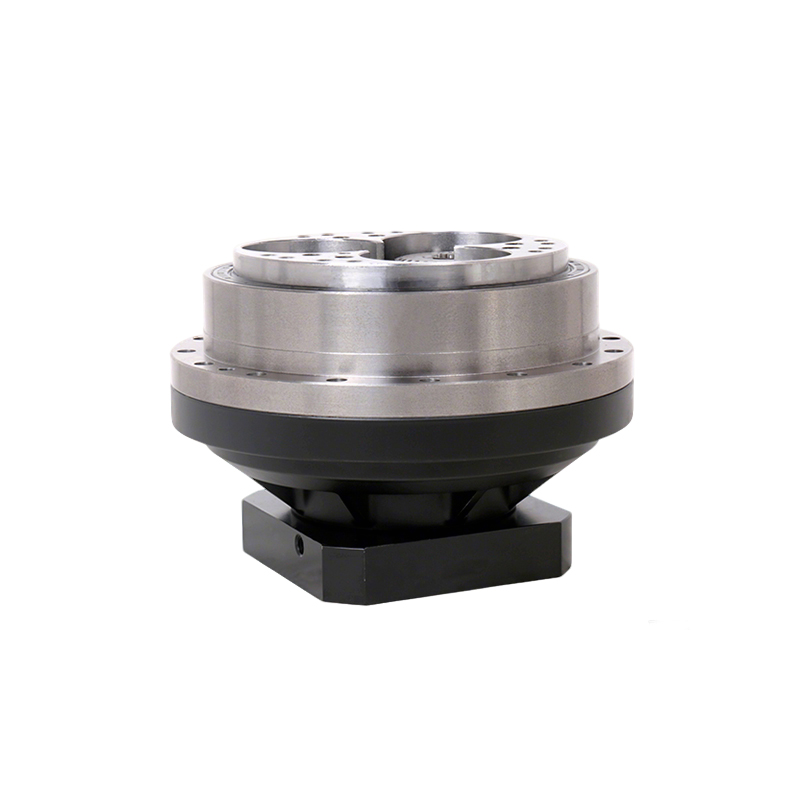


Le réducteur RV robotisé en PEEK est un dispositif de réduction de haute précision qui applique des matériaux composites PEEK (polyéther éther cétone) à la structure de transmission RV (rotation vectorielle), alliant la grande rigidité des réducteurs RV à la légèreté des matériaux PEEK. Voici une introduction aux aspects de l'innovation structurelle, des propriétés des matériaux, des indicateurs de performance et des scénarios d'application :
I. Innovation structurelle
Il adopte une structure de réduction à deux étages : le premier étage est un réducteur planétaire (planétaire + 3 satellites), et le second étage est un réducteur cycloïdal (2 roues cycloïdales avec un déphasage de 180°). Les principaux composants de la transmission sont constitués de PEEK moulé par injection renforcé à 30 % de fibres de carbone, les axes de denture sont en composite PEEK-métal (couche extérieure en PEEK résistante à l'usure + arbre central en acier), et le boîtier de palier de l'arbre excentrique intègre des bagues autolubrifiantes en PEEK, permettant un fonctionnement longue durée sans huile. La structure globale est optimisée par une topologie par éléments finis, réduisant le nombre de pièces de 25 % par rapport aux réducteurs RV traditionnels en acier.

II. Propriétés des matériaux
Avantage du rapport résistance/poids : la résistance à la traction de la roue cycloïdale en PEEK atteint 180 MPa, avec une densité de seulement 1,45 g/cm³, ce qui réduit le poids de 55 % par rapport aux roues cycloïdales en acier. Parallèlement, la résistance à la flexion du pied de dent est augmentée de 40 % grâce à l'orientation des fibres de carbone.
Performances dynamiques : Le coefficient d'amortissement du matériau est de 0,02 (0,001 pour l'acier), réduisant le bruit de transmission de 15 à 20 dB et augmentant la fréquence de résonance à plus de 3 000 Hz.
Adaptabilité environnementale : il maintient des propriétés mécaniques stables dans la plage de température de -60°C à 220°C, résiste à l'érosion de l'huile hydraulique et de l'huile pour engrenages et répond aux exigences de niveau de protection IP67.

III. Indicateurs de performance de base
Précision de transmission : jeu ≤ 15 secondes d'arc, précision de positionnement répétée ± 5 secondes d'arc, fluctuation du couple de démarrage à vide ≤ 3 %.
Capacité de charge : Couple de sortie nominal 80-300 N・m (modèles correspondants RV-40 à RV-110), facteur de surcharge à court terme 2,5 fois.
Efficacité et durée de vie : Efficacité de transmission 94 %-96 % (à 2 000 tr/min d'entrée), MTBF (temps moyen entre pannes) 20 000 heures (dans des conditions nominales).
IV. Scénarios d'application typiques
Robots humanoïdes : pièces à forte charge telles que les articulations de rotation de la taille et les articulations du genou, comme l'unité d'entraînement de l'articulation de la hanche de Tesla Optimus (nécessitant des réducteurs de classe 200 N・m).
Robots industriels : axes J2/J3 de bras mécaniques à six axes, remplaçant les réducteurs harmoniques traditionnels pour obtenir une rigidité plus élevée.
Équipements haut de gamme : robots de manipulation de plaquettes de semi-conducteurs, effecteurs terminaux de robots chirurgicaux, qui doivent répondre simultanément à des exigences de légèreté et de précision de positionnement au niveau du micron.









